top of page


技術紹介
1. 妊婦腹部に適合するハードウェア
-
定荷重ばねを用いた高さ調整機構
胎児は週数を重ねるにつれて成長し、
妊婦腹部が大きくなる。
センシングを必要とせずに適合するべく、
定荷重ばねを用いたカウンターバランス機構を搭載した。
これにより、受動的に腹部に沿い一定の接触力を担保することが可能となる。

-
妊婦腹部への受動角度追従機構
プローブにガイドリンクを取り付けることで妊婦腹部の接平面を受動的に取得できる。この際、重力によってガイドリンクに生じるモーメントはばねによって補てんすることで妊婦腹部に生じる局所的な圧力の上昇を防いだ。



柔らかい機構設計を施し、ロボットによる超音波検査を安全なものへ
2. 高精度な推定を行うソフトウェア
-
機械学習による頭部、腹部、脚部の認識
胎児は中期になると子宮内を動き回るようになり、胎児の向きや頭部、腹部、脚部の位置が外見からは予測不可能になる。超音波技師はプローブの位置と超音波画像から胎児の姿勢を予測するが、ロボットを介して妊婦健診を行うと予測しにくいといった声が挙がっていた。
これに対して機械学習による頭部、腹部、脚部の認識、またそこから胎児長軸(一般的には胎児の背骨)を予測することでそのわかりにくさを解消した。
右の動画では画面上の緑の数字が、上から体、頭、脚の予測値を表している。
AIによる健診サポートにより、ロボットによる健診の医師側の負担を最小化する
3. 負担・不安を軽減する制御
-
妊婦に不快感を与えないらせん走行
従来考えられていたプローブの走行法は腹部の上から下に直線状に動かすといったも��のであったが、この走行法では腹部のたわみによって画像が鮮明でなくなる問題点、また妊婦の方にプローブを押し付ける圧迫感を感じさせる問題点が存在した。
この問題に対し妊婦自動走査に適したプローブ操作方法を模索したところらせん走行を開発した。
この走行法により画像の鮮明性を保ち、妊婦の方の腹部の不快感を解消することに成功した。

らせん走行時妊婦腹部への接触力

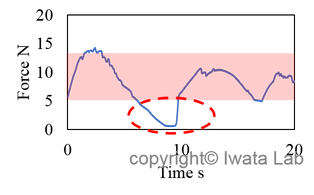
直線走行時の妊婦腹部への接触力
ロボットの動かし方を最適化することで、ロボットによる妊婦さん側の不安感を最小化する
*INOWAは早稲田大学岩田研究室の技術提供を受けています
bottom of page